
Net op het moment dat je ze een doodsklap wil geven, zijn ze verdwenen. Kakkerlakken slingeren zich razendsnel uit het zicht en wetenschappers hebben nu een robot gemaakt die dit ook kan.
Kakkerlakken zijn vervelende beesten met allerlei trucjes om te ontsnappen aan geërgerde mensen. Sommige van deze insecten kunnen wel tot 48 keer hun eigen lichaamslengte springen. Nu hebben wetenschappers in Berkeley een nieuwe ontsnappingsmanoeuvre ontdekt en zijn er in geslaagd deze na te doen met de robot DASH.
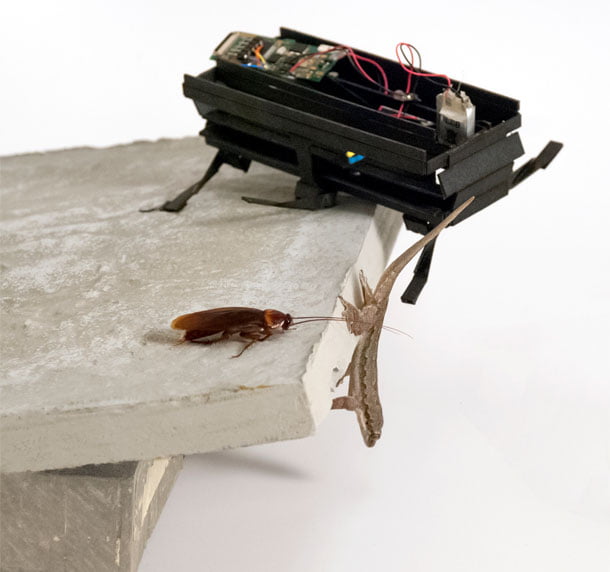
De ninjamanoeuvre is zo snel dat hij alleen met een hogesnelheidscamera te zien is. Kakkerlakken rennen met een snelheid van 50 lichaamslengtes per seconde (op mensenschaal enkele honderden kilometers per uur) op een richel af en laten zich vallen, terwijl hun achterpoten vastgeklampt blijven. Zo komen ze met slingerbeweging ondersteboven onder de richel, waarbij ze drie tot vijf keer de normale zwaartekracht voelen. Dat is te vergelijken met het gevoel op het laagste punt van een bungee jump.
De wetenschappers maakten op basis van deze beweging de robot DASH (Dynamic Autonomous Sprawled Hexapod). Met een slingersnelheid van 0,37 seconde is hij wel ruim een tiende seconde langzamer dan een kakkerlak en net iets langzamer dan gekko’s die het kunstje ook onder de knie hebben.
Bioloog Robert Full, een van de betrokken wetenschappers: “Tegenwoordig zijn sommige robots goed in rennen en andere in klimmen, maar er zijn maar weinig die beide kunnen of goed kunnen schakelen tussen de twee. De uitdaging ligt nu bij het maken van robots die kunnen schakelen op een complexe ondergrond.”
{kind=link}
Bronnen: PNAS, University of California via EurekAlert!
Beeld: Jean-Michel Mongeau and Pauline Jennings, PolyPEDAL Lab UC Berkeley.