
De natuurkunde achter lopen is grappiger dan gedacht. Althans bij mieren en meerbenige robots, zo ontdekten wetenschappers.
Een slang kronkelt en glibbert zich een weg door het bos. Er is niemand die hem in zijn voortgang nadoet. Of toch wel? Ook het lopen van mieren en robots met meer dan twee poten maakt gebruikt van glijdende bewegingen. Dat schrijft althans een team van robotdeskundigen, natuurkundigen en biologen, onder leiding van Nick Gravish van de University of California San Diego in Proceedings of the National Academy of Sciences.
Lees ook:
- Kolonie mierenrobots overwint obstakels
- Robot Leonardo kan lopen en vliegen
- Waarom sommige konijnen op hun voorpoten lopen
Loopbewegingen
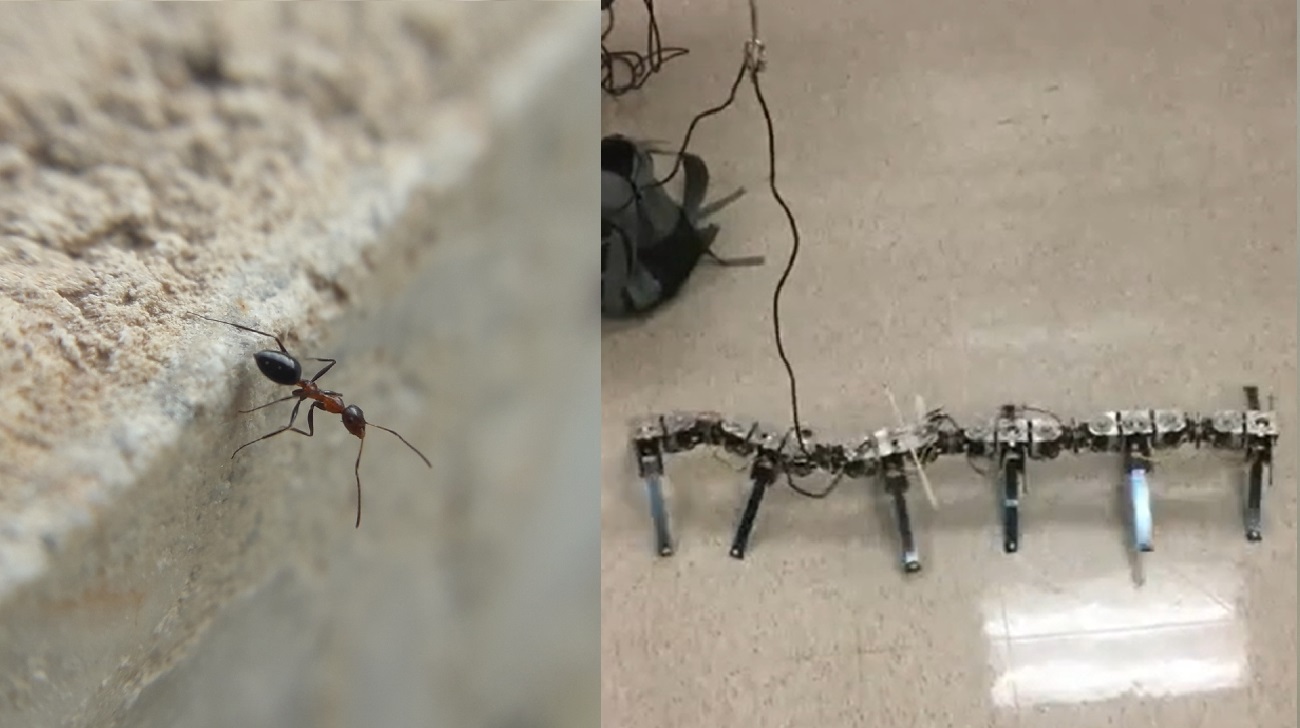
Eerst besloot het team van Gravish de looppassen van de Argentijnse mier in het lab te bestuderen. Deze mierensoort – die overigens ook in Nederland voorkomt – staat bekend om zijn vermogen als langeafstandloper. Bijna alle soorten terreinen gaan hem goed af. In het lab lieten de onderzoekers een kolonie af en aan lopen voor voedsel.
Tijdens het lopen werden de houdingen van de mieren op elk moment binnen de passen, door middel van geavanceerde camera’s, geregistreerd. De onderzoekers zetten op een computer deze bewegingen om in simpeler figuren. Een speciaal algoritme kon deze figuren vervolgens gebruiken om de toekomstige bewegingen te voorspellen.
Tenslotte werden ook de robots bij het experiment betrokken. De loopbewegingen van verschillende typen robots met meerdere benen werden geanalyseerd op dezelfde wijze als de mieren. Het algoritme bleek inderdaad ook hier toepasbaar te zijn.
Slippercentage
Tot zover nog niks spannends. Interessant werd het pas toen het computermodel naging hoe de bewegingen van mier en robot precies tot stand kwamen. In 5 procent van de totale looppas van een mier was hij aan het slippen. Dat wil zeggen; op dat ene korte moment glibberde hij een beetje over de grond als een slang.
Bij de robots was er meer zichtbaar. Het slippercentage van de BigANT, een robot op basis van een mier, bedroeg 12 tot 22 procent en de multipod-robots (met tussen de 6 en 12 poten, zie foto rechts hierboven) haalden 40 tot 100 procent. Die laatste robots doen dus niet veel onder voor een kronkelende en glibberende slang.
Robotontwerp
Grappig idee natuurlijk, dat mieren en robots al lopend een beetje glijden. Maar hebben wij nog wat aan deze kennis? Jazeker. Het ontwikkelen van toekomstige robots wordt er iets gemakkelijker op. Robot-ontwerpers weten nu namelijk dat het slippercentage iets is om rekening mee te houden bij toekomstige lopende meerbenige robots.
Daarnaast denkt het team van Gravish dat ook biologen er mee aan de slag kunnen. Het zou namelijk mogelijk kunnen zijn dat de eerste landdieren – die vanuit de zee het land ‘op zijn komen glibberen’ – al de motorische zenuwen hadden om het lopen op land tot een succes te maken. Zwemmen lijkt namelijk wel een beetje op het glibberen en kronkelen van een slang.
Voor nu willen de onderzoekers hun computermodel verder finetunen, door bijvoorbeeld ook wrijvingskrachten mee te nemen. Ook is het een idee om te zien of tweebenige organismen – zoals de mens – soms ook gebruikmaakt van slip in zijn loopbeweging. De onderzoekers denken van wel, denk bijvoorbeeld aan de moonwalk van Michael Jackson.
Bronnen: PNAS, University of California, San Diego, via EurekAlert!
Beeld: links; Ahmad252, CC-BY-SA 4.0, rechts; University of California San Diego, University of Michigan