Een technisch team van het MIT heeft een nieuw robotsysteem ontwikkeld dat van alle markten thuis is. Deze mix and match-robots kunnen astronauten helpen bij maanmissies.
NASA is van plan om in de komende jaren een permanente basis op de maan te bouwen. Wanneer astronauten dat gaan doen, kunnen ze wel wat hulp gebruiken. Robots komen goed van pas bij het dragen van zware kabels, het installeren van zonnepanelen en bij het bouwen van communicatietorens en verblijven. Geen enkele robot is geschikt om alle taken te doen, maar allemaal verschillende meebrengen op maanmissies zou ook weer zo inefficiënt zijn. Als oplossing ontwikkelde een team van het Massachusetts Institute of Technology (MIT) een nieuw robotsysteem met onderdelen die je kunt combineren tot de robot die op dat moment nodig is.
Lees ook:
- ‘Het kán: een opblaastelescoop op de achterkant van de maan’
- Alles wat je moet weten over de SLS-raketlancering
- Artemis: na 50 jaar terug naar de maan
Lunaire zuidpool
De MIT-technici bedachten hun concept tijdens NASA’s Breakthrough, Innovative and Game-changing (BIG) Idea Challenge. Dit is een jaarlijkse competitie voor studenten om een baanbrekend idee voor NASA-missies te ontwerpen, ontwikkelen en te demonstreren. In 2022 werden de studenten uitgedaagd om een robotsysteem te bedenken dat extreem terrein kan oversteken zonder wielen te gebruiken.
Het team focuste zich op een ontwerp dat geschikt zou zijn voor de zuidpool van de maan: een landschap dat zich kenmerkt door veel stof, rotsachtige hellingen en diepe lavabuizen. De omgeving heeft ook permanent beschaduwd terrein dat bevroren water zou bevatten. Eenmaal bereikbaar kunnen die gebieden essentieel zijn voor astronauten.
Dierlijke inspiratie
Tijdens het brainstormen bedachten de studenten dat bepaalde dieren erg geschikt kunnen zijn voor bepaalde missies. Zo kan een spin in een lavabuis afdalen en die verkennen, terwijl olifanten zware apparatuur kunnen dragen. “Toen realiseerden we ons dat een van de simpelste dieren, de worm, net zo beweegt als een arm, een ruggengraat, of een staart”, zegt adjunct-teamleider Michael Brown. “Daarna viel het kwartje: we kunnen al deze op dieren geïnspireerde robots bouwen door wormvormige aanhangsels te gebruiken.”
Zo kwam het team uiteindelijk op zijn nieuwe robotsysteem WORMS, wat staat voor Walking Oligomeric Robotic Mobility System. Het woord ‘oligomeric’ is Grieks voor ‘een paar onderdelen’. MIT Aeronautics and Astronautics (AeroAstro)-student Brooke Bensche legt uit: “Wij hadden het idee om een paar universele onderdelen in allerlei combinaties te mixen en matchen om zo verschillende robots te krijgen.”
Klik-en-klaar
Het systeem bestaat uit wormachtige poten, meerdere soorten ‘schoenen’ die onderaan de poten zijn te bevestigen, en verschillende pallets die het ‘lichaam’ vormen. Via draai-en-vergrendelbare koppelingen, oftewel Universal Interface Blocks (UIB’s), klikken de onderdelen snel en gemakkelijk aan elkaar. Bovendien zijn de robots zo ook eenvoudig uit elkaar te halen, zodat de onderdelen weer kunnen worden gebruikt voor een nieuwe robot. George Lordos, PhD-kandidaat en AeroAstro-instructeur, is trots: “Het ontwerp is flexibel, duurzaam en kosteneffectief”.
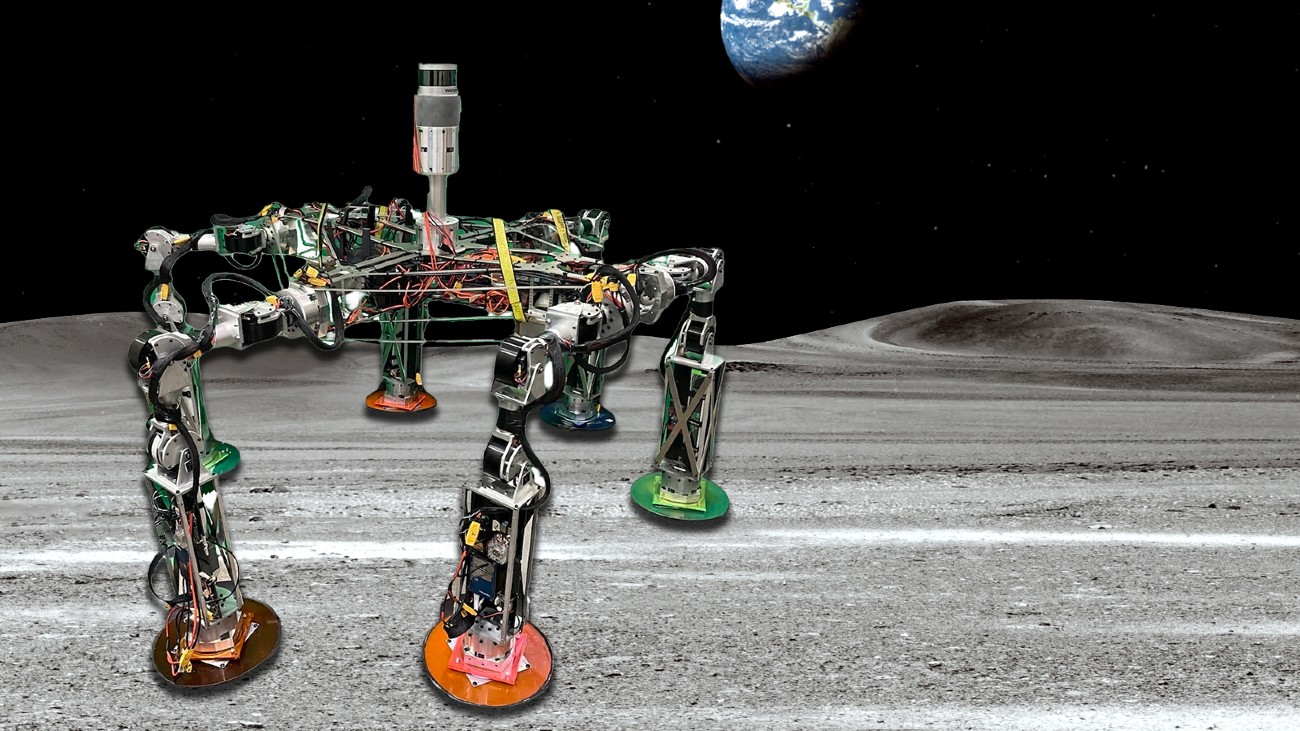
Ter demonstratie maakte het team een spinachtige robot, genaamd WORMS-1. Met een bevestigde LiDAR-sensor zou deze bot het maanlandschap in kaart kunnen brengen. Hij werd vorige week gepresenteerd bij de IEEE Aerospace Conference in Montana. In het filmpje zie je WORMS-1 in actie.
Bronnen: New Atlas, Massachusetts Institute of Technology
Beeld: George Lordos et. al., aangepast door MIT News