
Een robot die zijn energie opslaat in verende spieren kan wel 30 meter hoog springen. Zijn ontwerper wil ermee naar de ruimte, om stuiterend over de maan en andere planeten te reizen.
Het is lente en dat betekent volop springende lammetjes in de wei. Of robots, als het aan onderzoeker Elliot Hawkes van de Universiteit van Californië in Santa Barbara ligt. In het wetenschapsblad Nature presenteert hij een springende robot met dunne spinnenpoten die wel dertig meter hoog haalt. Interessant om mee te onderzoeken hoe springen eigenlijk werkt én als mogelijke maanverkenner, denkt de roboticus.
Lees ook:

Wereldrecord
De wereldrecords hoogspringen staan al decennia vast: 2,45 meter voor Javier Sotomeyer in 1993 en 2,09 meter voor Stefka Kostadinova in 1987. De nieuwe springrobot van Hawkes en collega’s komt met gemak tien keer zo hoog. In onderstaand filmpje is zelfs te zien hoe hij een klif op springt, zichzelf rechtzet en nog een keer springt. Hoe dan?
In hun Nature-artikel werken Hawkes en collega’s uit wat de beperkende factoren zijn voor springfanaten, zoals de hoeveelheid sprongenergie per kilo aan gewicht of hoelang het afzetten duurt. Vervolgens ontwierpen ze een robot die zo hoog mogelijk scoort op al die factoren. Zo kwamen ze op een lichtgewicht ontwerp van 30 gram en een lengte van 30 centimeter met een relatief klein motortje.
Afkijken
Kan een nieuwe Sotomeyer spieken bij de springrobot van Hawkes? Helaas niet, rekent de onderzoeker voor. De springrobot gebruikt namelijk een ratelmotor die elke slag energie opslaat in een veer die op slot zit met een grendel. Zo kan de robot energie opbouwen tot de grendel losschiet en hij een reuzensprong maakt, waar een menselijke hoogspringer alle energie uit een spierbeweging moet halen.
Zonder nuttige lading versnelt Hawkes’ robot tijdens het afzetten in 0,009 seconde tot meer dan 100 kilometer per uur. De beste levende springers maken volgens de onderzoeker tien keer minder energie vrij, net als bestaande robots zoals van Boston Dynamics.
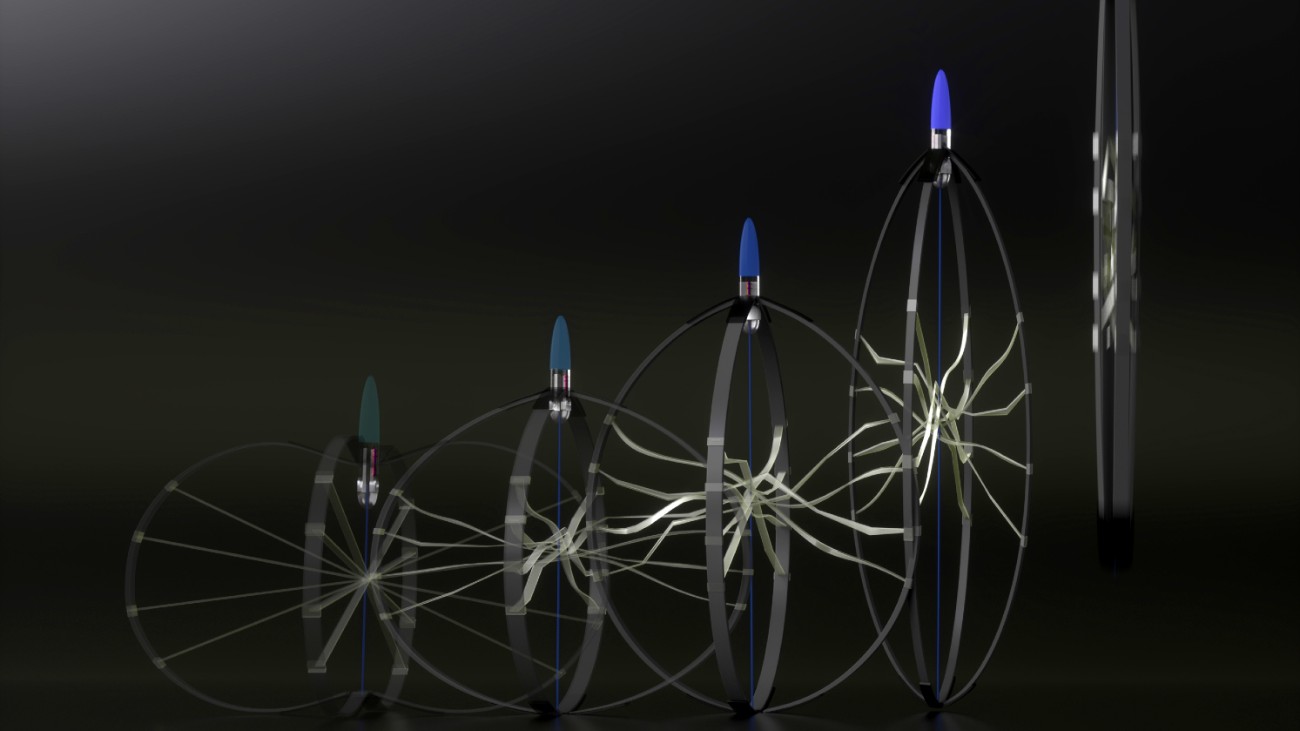
“We hebben ons ontwerp natuurlijk helemaal geoptimaliseerd op sprongkracht”, geeft de onderzoeker toe. Zo is de voet waarmee hij afzet zo licht mogelijk en klappen de spinachtige poten tijdens de sprong in zodat de robot als een gestroomlijnde speer door de lucht schiet. Volgens de roboticus zit het ontwerp al dicht op de grens van wat mogelijk is met bestaande materialen.
Maanverkenner
Gave plaatjes, maar wat heb je nou helemaal aan een mechanische springspin die dertig meter hoog komt? Hawkes en consorten ontwierpen hun robot vooral om te laten zien dat hun analyse van springkracht klopt, maar ze willen best even filosoferen over toepassingen.
De onderzoekers denken dat hun springende robot potentie heeft om lastig terrein te verkennen op aarde, op de maan of zelfs op andere planeten. Als een karretje zich geen weg kan banen door rotsen en kloven en een drone de brandstof niet heeft om eindeloos in de lucht te blijven, kun je altijd nog met een mechanische springspin over het landschap stuiteren om dat in kaart te brengen met een lichtgewicht camera.
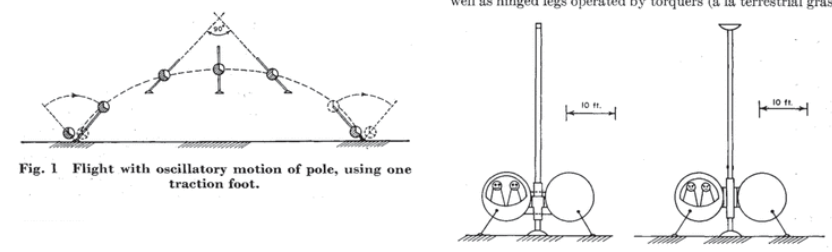
In de lagere zwaartekracht van de maan kan de robot van Hawkes en collega’s wel honderdvijfentwintig meter hoog en een halve kilometer ver springen. Springend op de maan maak je nog eens meters, dacht ook ruimtevaartexpert H. Seifert: in 1967 publiceerde die een ontwerp voor een ‘lunar pogo stick‘, een voertuig om astronauten met grote sprongen over de maan te laten bewegen. Of je dan ook weet waar je neerkomt is maar de vraag: menselijke astronauten zullen het graag houden bij een maankarretje in plaats van over de satelliet te springen in zevenmijlslaarzen.
Bronnen: Nature, Journal of Spacecraft
Beeld: Elliot W. Hawkes